Category: Paper
-

Jordan presents V&V for vision-based systems at ATVA
—
Jordan Peper went all the way to Bengaluru, India, to present our work (in collaboration with UIUC) on unified verification and validation of vision-based autonomy at the International Symposium on Automated Technology for Verification and Analysis (ATVA). Allegedly, this is a hot problem, but the abstraction is quite complex. That’s what it takes — for…
-

IROS showcase: world models, image repair, data cleaning
—
Ivan went all the way to Hangzhou, China, to present several research works on world models, image repair, and data cleaning. Here are the paper citations on which these presentations were based:
-
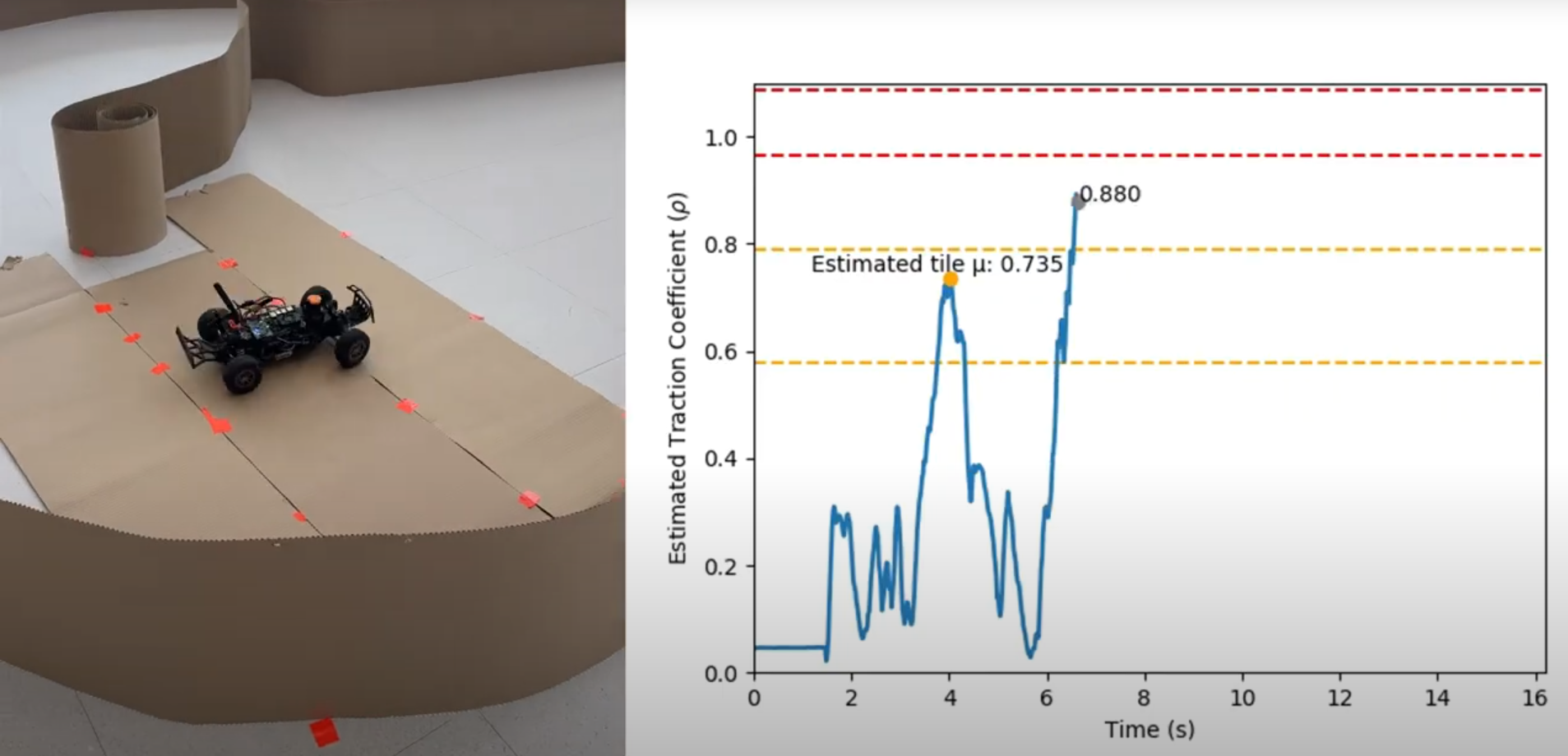
New preprint: online friction estimation for racing
Our lab pushed out an experimental project on detecting slip and estimating the tire friction from the onboard sensors (lidar & IMU) on RoboRacer (aka F1/10) cars. No fancy models, no sophisticated data collection, no need for post-processing. It turned out pretty accurate!
-
Ivan presents conservative perception abstractions at Allerton
—
Ivan talked about conservative abstractions of perception-driven systems at the University of Illinois Urbana-Champaign in the Allerton Conference. The rumor is that these abstractions are too conservative. Citation:
-
New preprint: how safe will I be given what I saw?
An extension of our modular family of learning-based safety predictors from L4DC 2024, now with transformers and quantization! Citation:
-
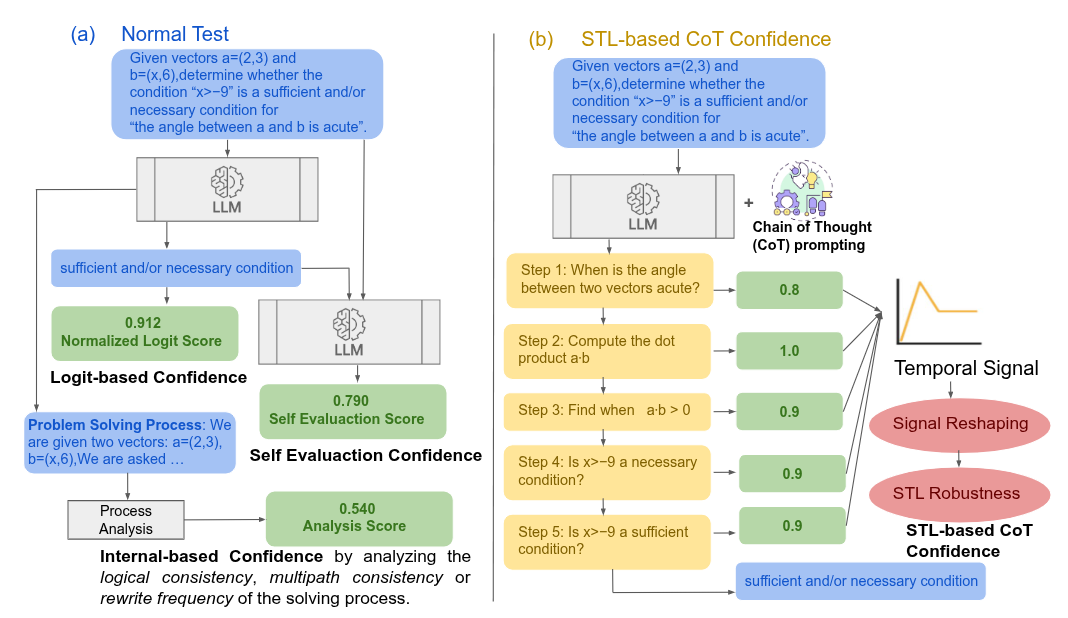
New preprint: chain-of-thought confidence with STL
We converted a SAS course project to a workshop paper about how to calibrate the confidence in chain-of-thought reasoning using a temporal logic formula: Stay tuned for more!
-
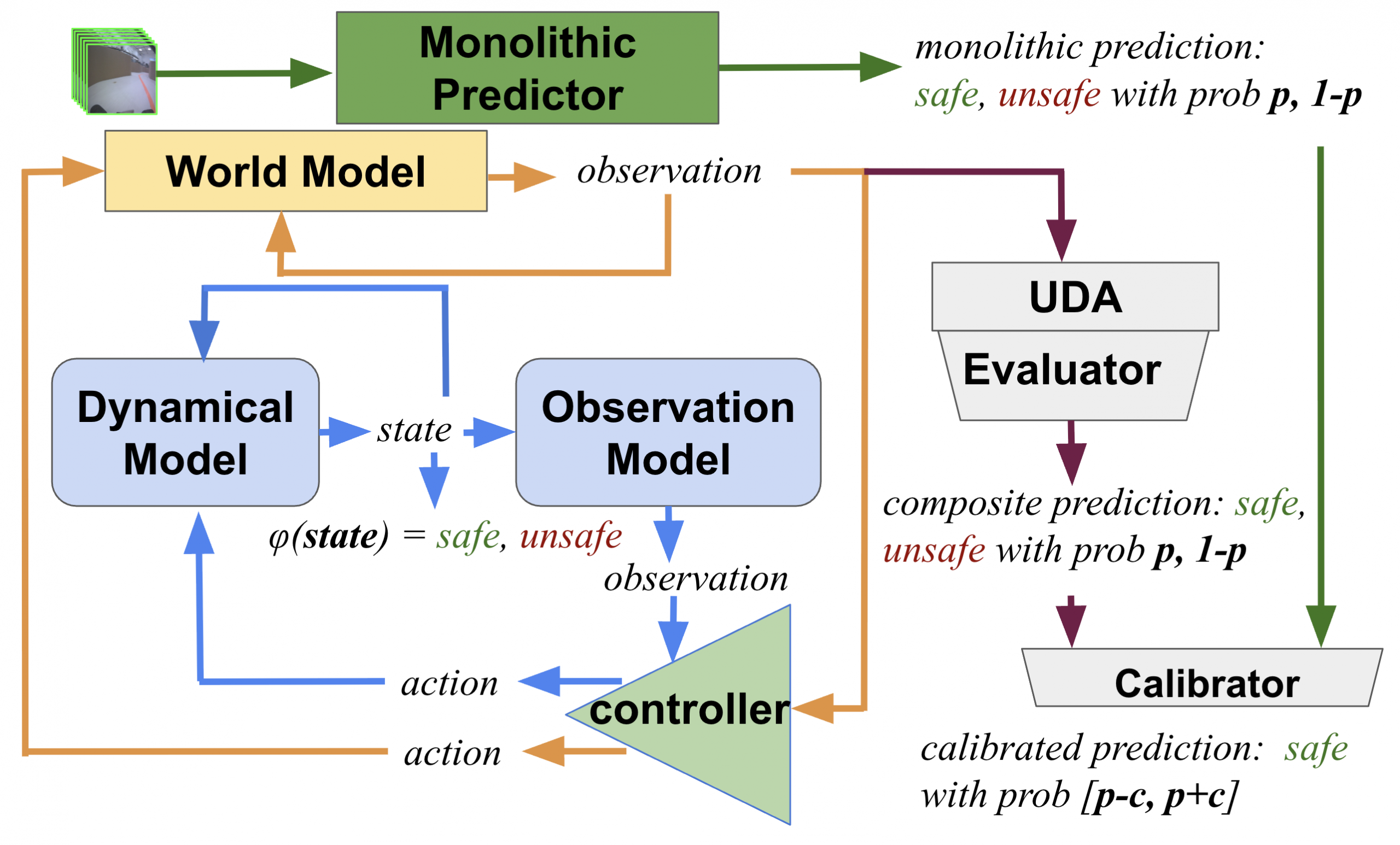
New preprint: conservative perception abstractions
A new preprint is out on low-dimensional symbolic models of deep visual perception that enable conservative (i.e., non-overconfident) safety analysis. Citation: Matthew Cleaveland, Pengyuan Lu, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Conservative Perception Models for Probabilistic Model Checking [Arxiv]. Preprint, 2025.
-

New preprint: generalizable image repair
Advanced GANs make short work of previously unseen image corruptions. Update: accepted to IROS 2025! Citation: Carson Sobolewski, Zhenjiang Mao, Kshitij Vejre, Ivan Ruchkin. Generalizable Image Repair for Robust Visual Autonomous Racing [Arxiv] [Poster] [Github] [Video]. Preprint, 2025.
-
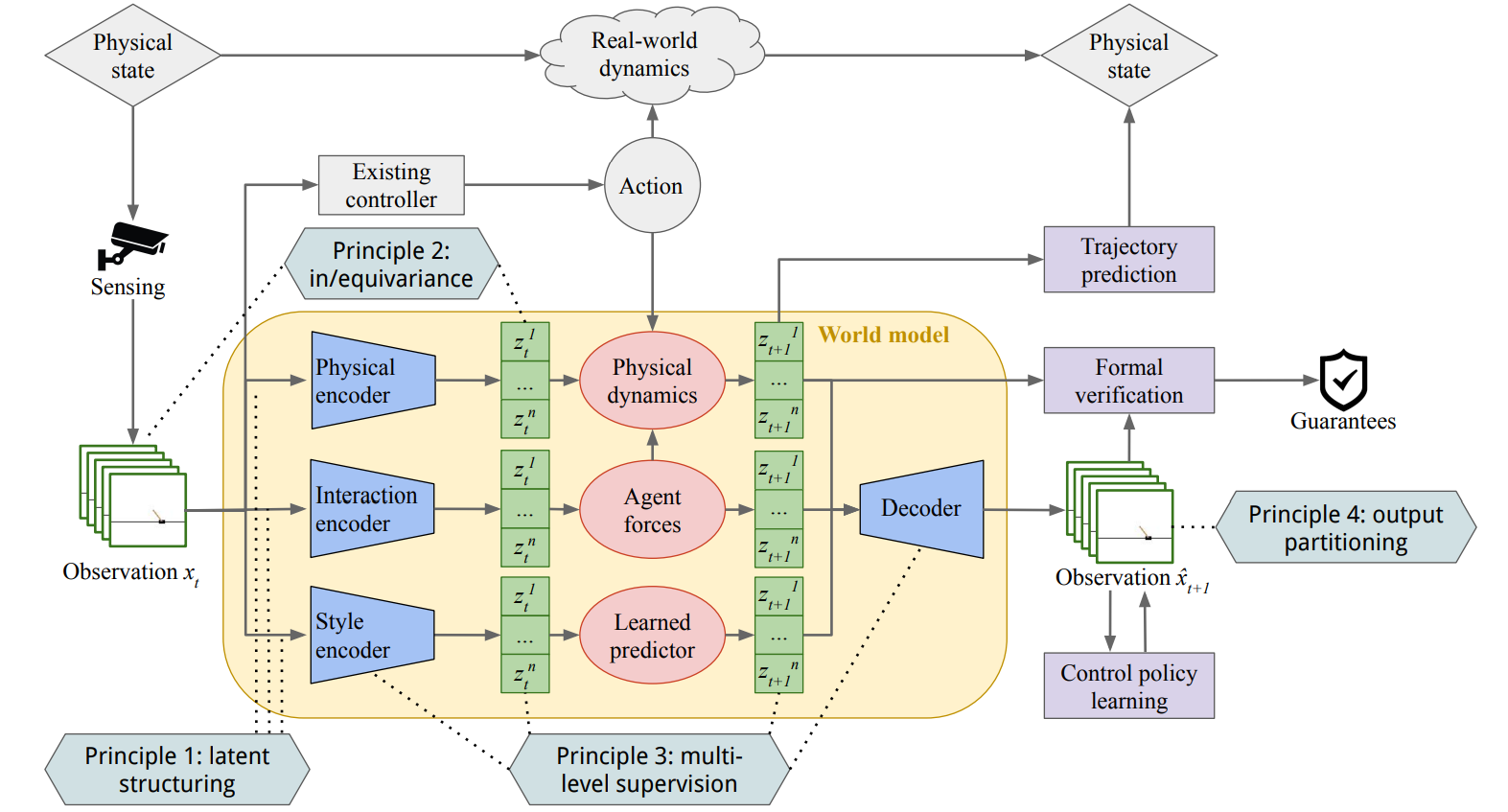
New preprint: principles for interpretable world models
Our new paper articulates four key principles for physical interpretability of world models. We paint a broader picture on neuro-symbolic world models, beyond our recent preprint on a specific technique for physically interpretable world models for trajectory prediction. Update: accepted and presented at NeuS 2025! It also got publicized at ICRA. Citation:
-
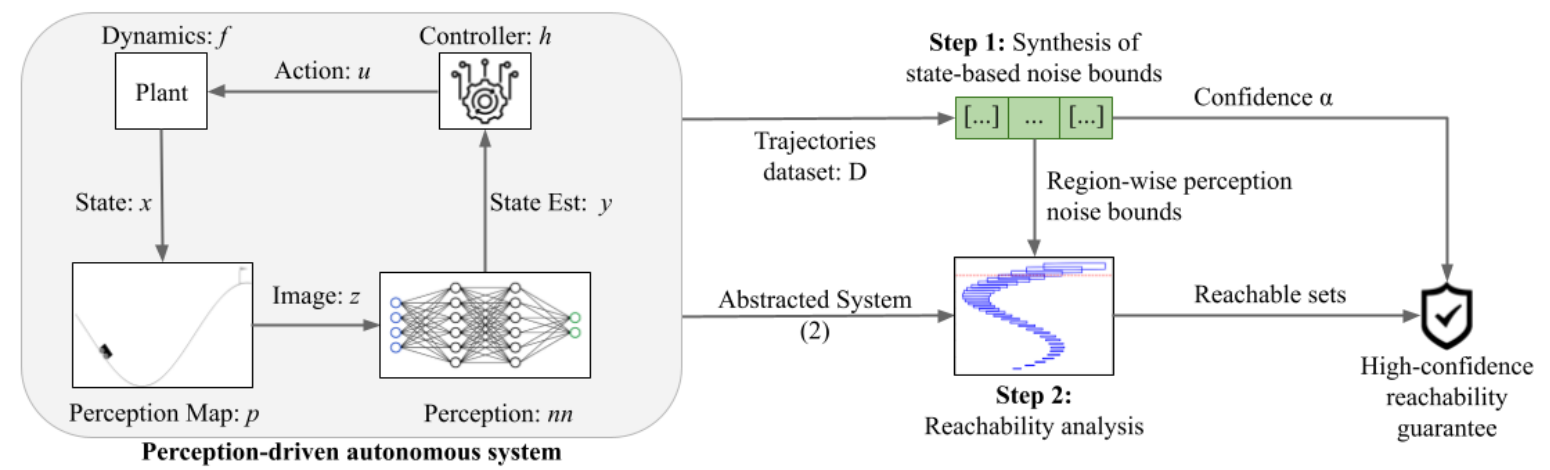
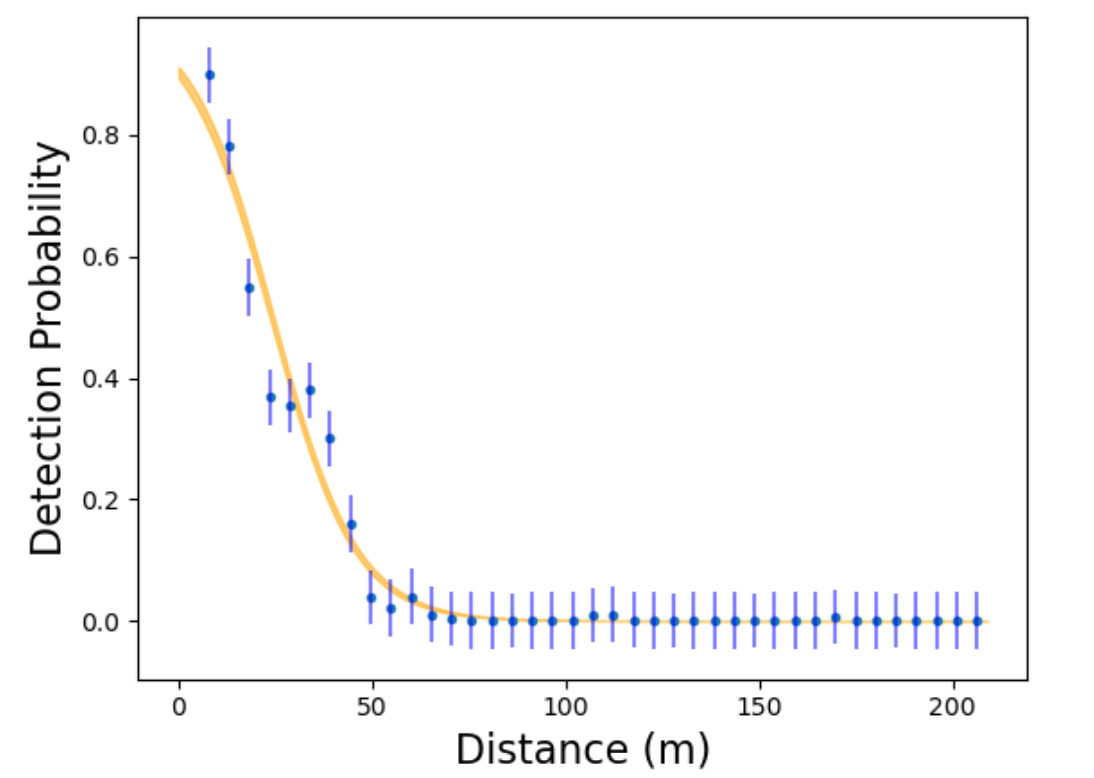
New preprint: state-based conformal prediction
Our first collaborative paper on the NSF Neuro-Symbolic Bridge project with RPI is online! It develops a novel way to get tight conformal prediction bounds on perception error in order to improve the accuracy of reachability verification. Update: published and presented at NeuS’25! Citation: