Category: Paper
-

New preprint: stratified neuro-symbolic architecture
Check out our nice and short position paper. The key idea is to intermingle neural components and symbolic knowledge at each level of the autonomy stack. Update: published in FSE’25! Citation:
-

New preprint: physically interpretable world models
Our recent preprint develops an architecture and a training method to give latent states physical meaning in the context of trajectory prediction:
-

Two surveys: neuro-symbolic AIoT and CPS sustainability
Zhen Lu, Imran Afridi, Hong Jin Kang, Ivan Ruchkin, Xi Zheng. Surveying Neuro-Symbolic Approaches for Reliable Artificial Intelligence of Things [Springer]. In Springer Journal of Reliable Intelligent Environments (JRIE), 2024. Ankica Barišić, Jácome Cunha, Ivan Ruchkin, Ana Moreira, João Araújo, Moharram Challenger, Dušan Savić, Vasco Amaral. Modelling Sustainability in Cyber-Physical Systems: a Systematic Mapping Study [Elsevier]. In Elsevier Sustainable Computing:…
-
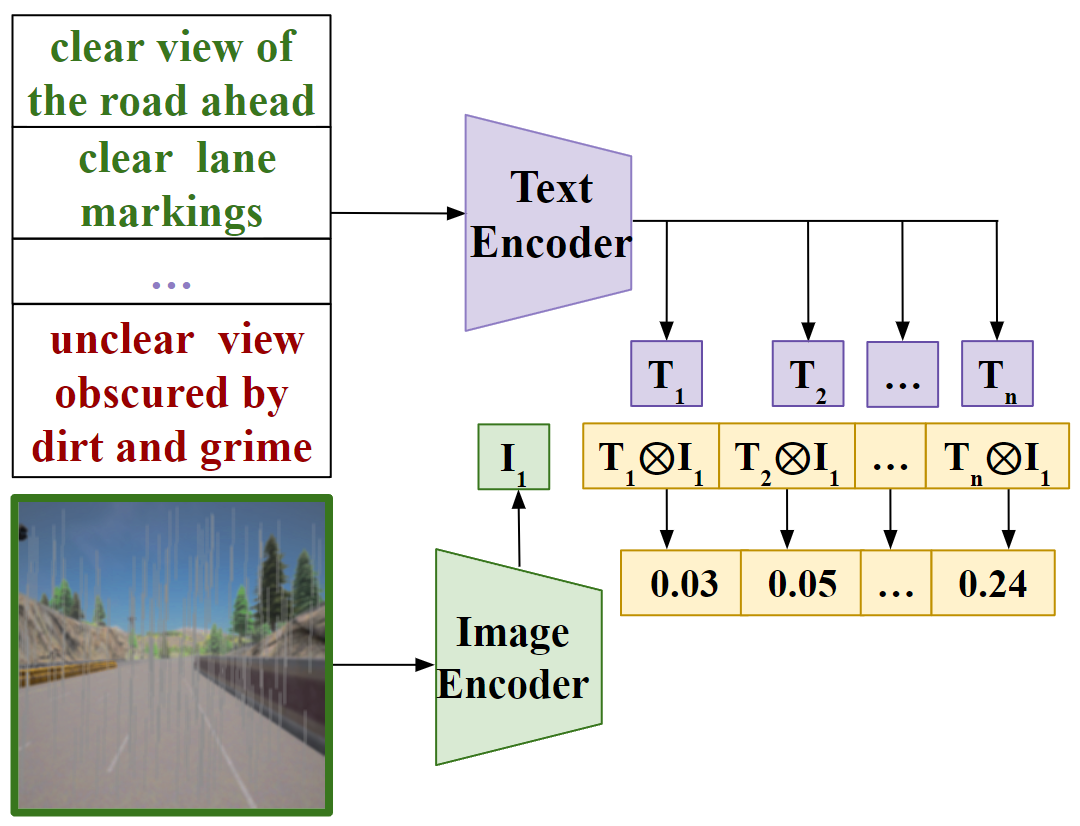
Language-enhanced OOD detection: new preprint online
Our paper gives users of autonomous cars the ability to describe in natural language what conditions they consider nominal or anomalous. Citation:
-

Foundation world models: new preprint online
Our paper develops training-free world models based on foundation models with interpretable latent states. Update: presented at the probabilistic robotics workshop at ICRA’24. Citation:
-
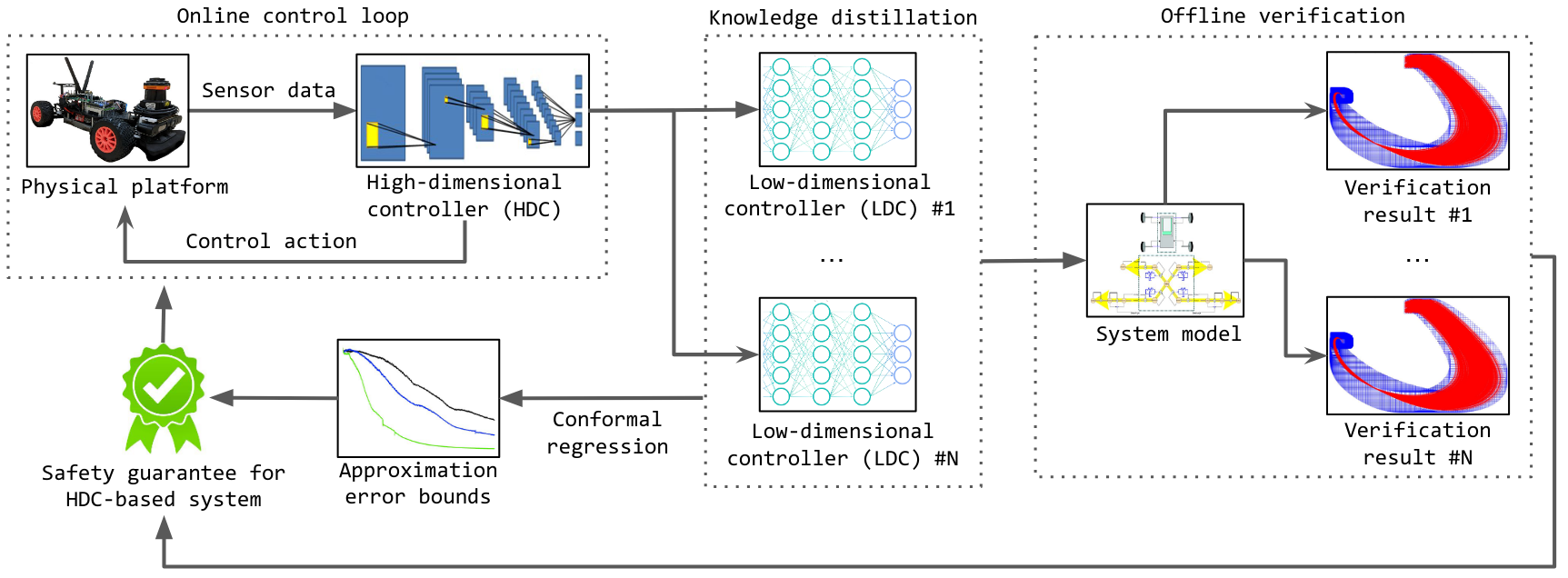
Verifying high-dimensional controllers: new preprint online
Our new draft verifies image-based controllers by approximating them with several low-dimensional ones. Citation: Yuang Geng, Souradeep Dutta, Ivan Ruchkin. Bridging Dimensions: Confident Reachability for High-Dimensional Controllers [arxiv]. Preprint, in submission.
-
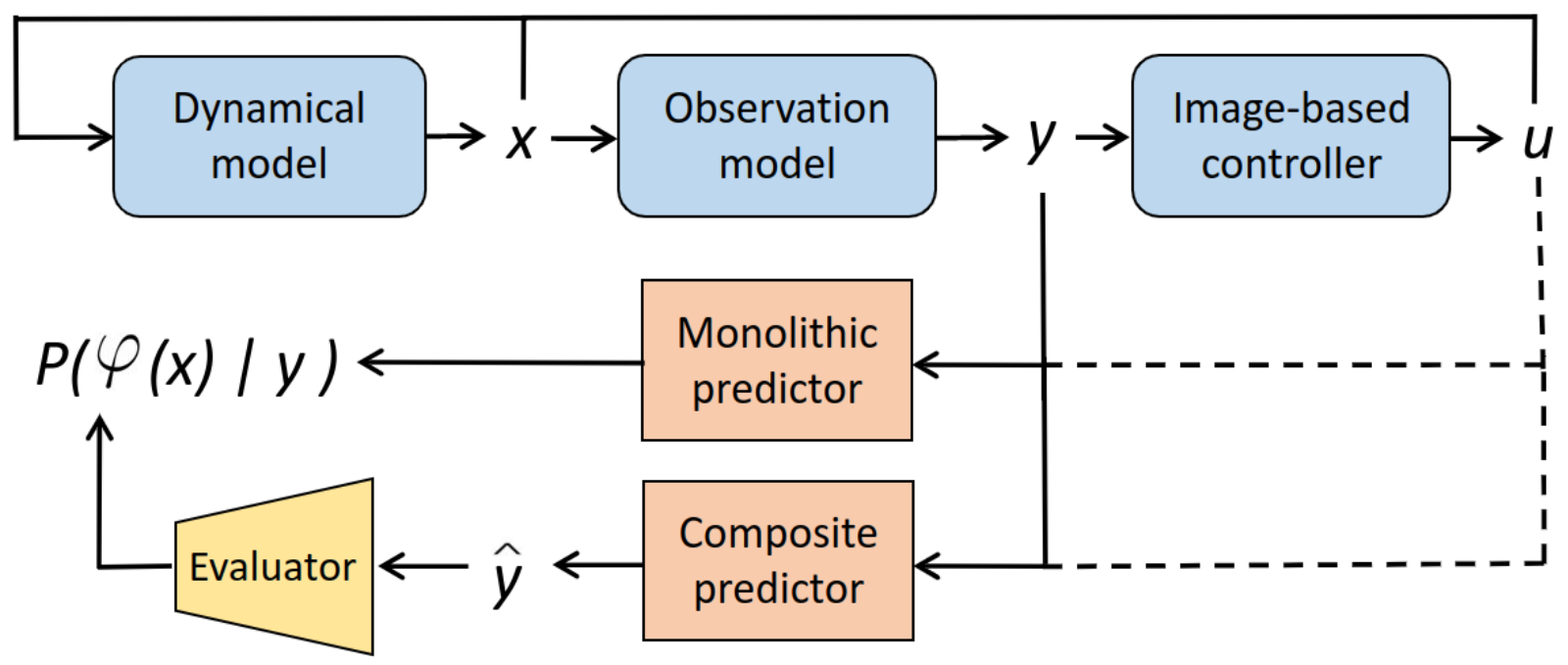
How safe am I given what I see? New preprint online
Update: a poster was presented at UF AI Days 2023. This paper develops safety chance prediction for image-controlled autonomous systems with calibration guarantees. Citation: Zhenjiang Mao, Carson Sobolewski, Ivan Ruchkin. How Safe Am I Given What I See? Calibrated Prediction of Safety Chances for Image-Controlled Autonomy [arxiv]. Preprint, in submission.