Category: Paper
-

Zhenjiang and Ani present temporal confidence at ACL’26
—
Ani (who also volunteered) and Zhenjiang traveled to the Association for Computational Linguistics (ACL) conference in San Diego to present our work on using temporal signatures in language model logics to calibrate their correctness confidence. It was an exciting contribution and an exciting trip!
-
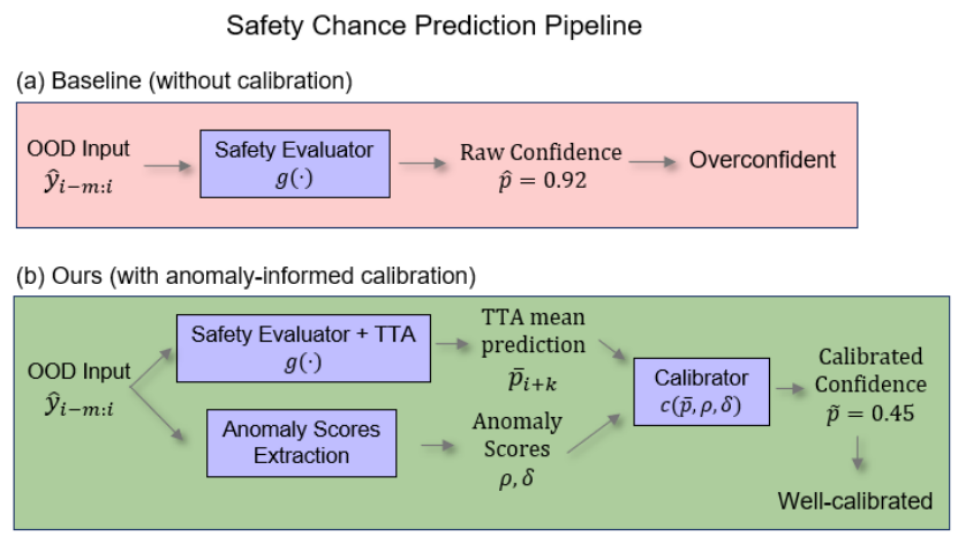
New preprint: anomaly-informed safety confidence
We developed a new safety prediction pipeline that leverages a vector of anomaly scores to predict the system’s safety confidence. Somehow, it manages to generalize to unseen anomalies in sensing and dynamics. Citation:
-

Zhenjiang presents confidences & world models at CPS Week
—
Zhenjiang Mao travelled all the way to Brittany in France to present his recent contributions at the CPS-IoT Week 2026. First, Zhenjiang showcased his proposed PhD work on “Action Confidence Trajectories for Safety Assurance in Autonomous Systems” at the CPS-IoT Week PhD Forum. He gave a short pitch and then presented a poster, which was…
-

New preprint: elimination for hypothesis testing
As a starting point towards using bandit-style algorithms for autonomy, we have developed finite-sample bounds for efficient hypothesis testing while eliminating unlikely hypotheses. Citation:
-
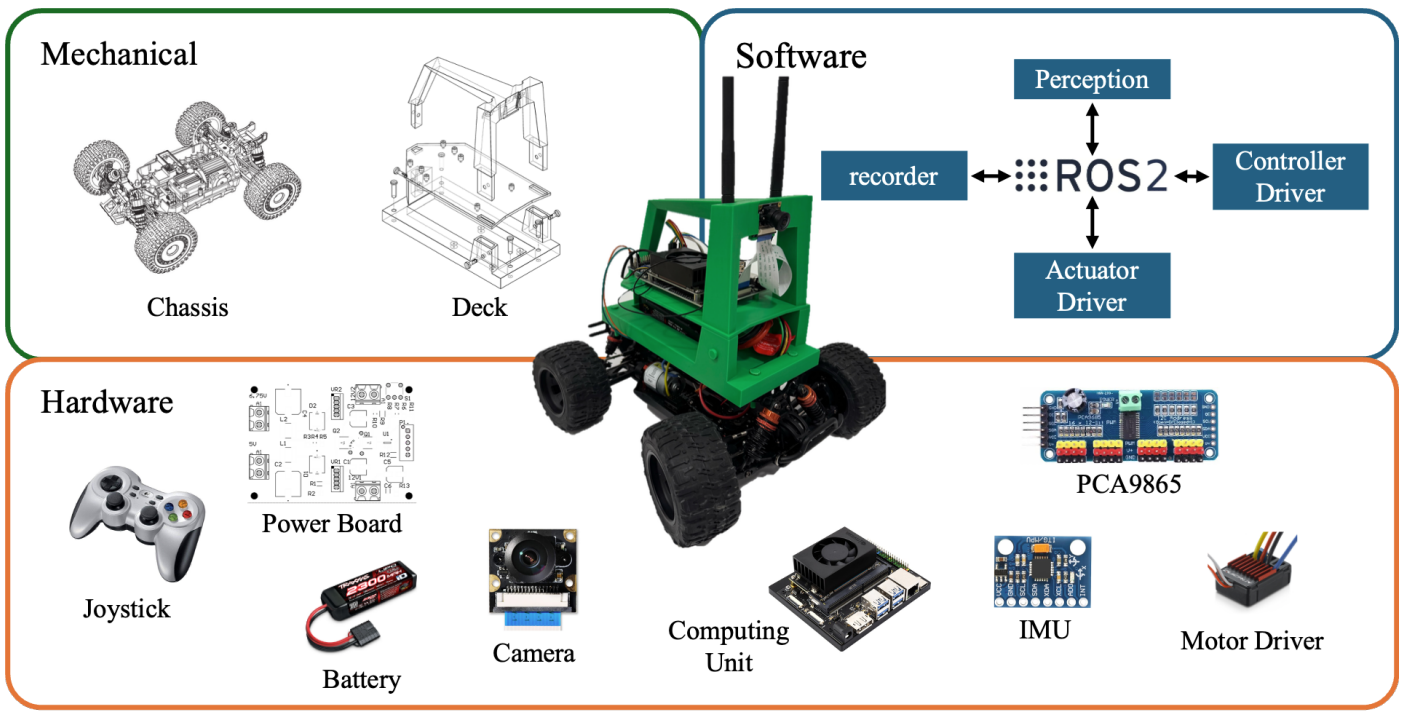
New preprint: TEACar Autonomous Racing Platform
We have released our shiny new TEACar platform for autonomous racing, inspired by DonkeyCar but with upgraded mechanical, hardware, and software components! Citation:
-

New preprint: a broad view of CPS resilience
Ivan took part in a large many-university effort to summarize the state of resilient cyber-physical systems (CPS) and the outlook for future research in this area. Five themes have emerged. Citation:
-

New preprint: latent-entropy anomaly detection
In collaboration with ECE colleagues, we have put out a new variant of our unsupervised anomaly detection pipeline. This one uses a latent entropy loss to scramble the latent space, making anomalies harder to reconstruct (and hence easier to detect). No supervision (including a normal-only dataset) needed! Citation:
-
New preprint: verifiable deterministic world models
Our exploration of world models for system assurance resulted in a semi-predictable but currently unfashionable choice: removing randomness and uncertainty from the latent space made world models more verifiable (although a tiny bit less picture-perfect). More surprisingly, this step made the behaviors produced by them more relevant to the real world. As a result, we…
-

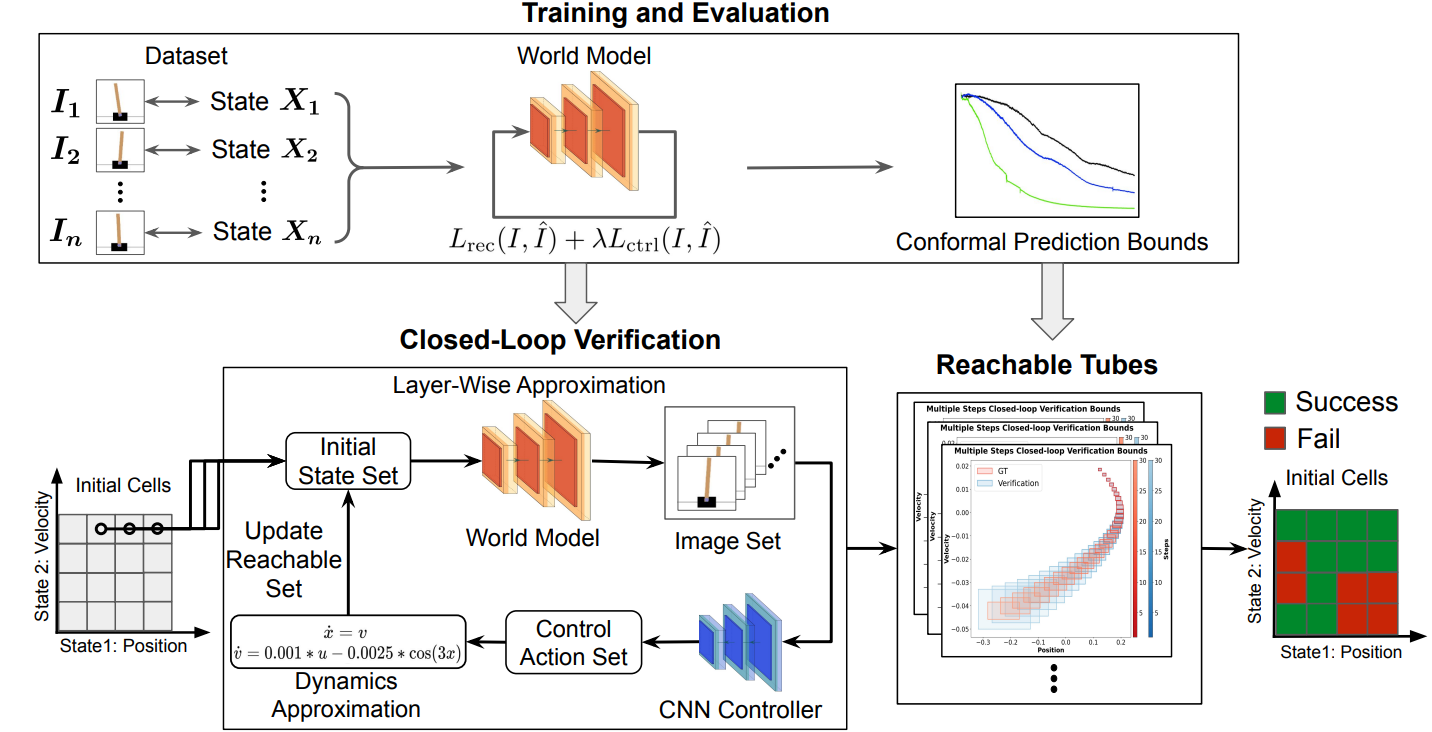
New preprint: statistical-symbolic verification of perception
Our collaboration with RPI has yielded an extended and improved version of our NeuS’25 paper: combining conformal prediction for neural perception with reachability analysis for the dynamics and control. This problem required constructing a discrete abstraction of the perception neural net, which we did with a genetic algorithm. Citation:
-

New preprint: a survey of CPS assumptions
We’ve put in a big effort to find, categorize, and analyze assumptions and guarantees in papers on cyber-physical systems since 2014. Now we’re happy to release the results! Citation: We are also sharing our database of analyzed papers and assumptions.