Update: a poster was presented at UF AI Days 2023.
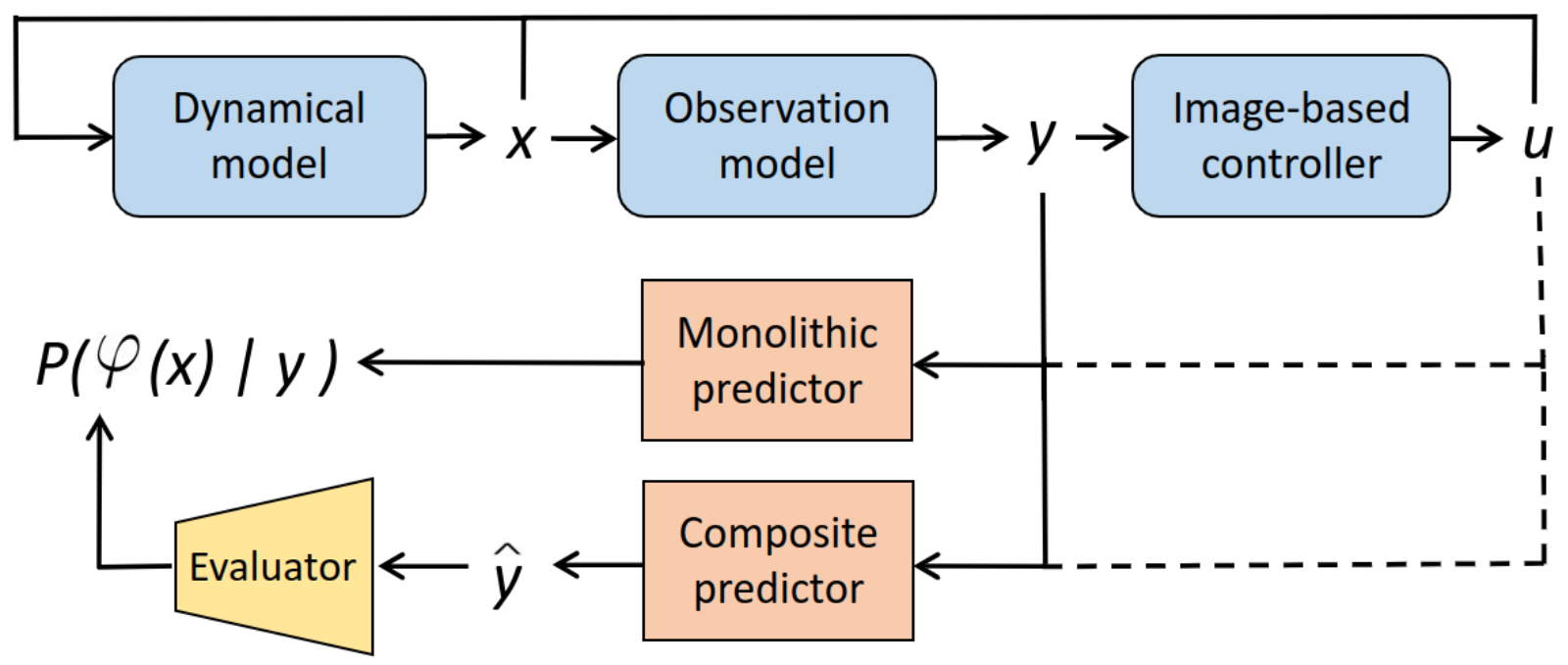
This paper develops safety chance prediction for image-controlled autonomous systems with calibration guarantees.
Citation:
- Zhenjiang Mao, Carson Sobolewski, Ivan Ruchkin. How Safe Am I Given What I See? Calibrated Prediction of Safety Chances for Image-Controlled Autonomy [arxiv]. Preprint, in submission.