Author: Ivan
-

Sam, Yuang, Zhenjiang present posters at UF AI Days 2024
On October 29, 2024, the three students presented posters about the following papers: Zhenjiang Mao, Dong-You Jhong, Ao Wang, Ivan Ruchkin. Language-Enhanced Latent Representations for Out-of-Distribution Detection in Autonomous Driving [Arxiv] [Slides]. Robot Trust for Symbiotic Societies (RTSS) Workshop (co-located with ICRA 2024), Yokohama, Japan, 2024. Zhenjiang Mao, Siqi Dai, Yuang Geng, Ivan Ruchkin. Zero-shot Safety Prediction…
-

Ivan presents calibrated visual safety prediction at TACPS workshop at ESWEEK
Ivan gave an invited talk “How Safe Will I Be Given What I See? Calibrated Visual Safety Chance Prediction with (Foundation) World Models”. The discussion was very active and generated sufficient questions for the rest of Zhenjiang’s PhD. Relevant links: Talk page Workshop page Conference page Slides Talk abstract: In safety-critical autonomous systems, safety prediction…
-

Yuang presents high-dimensional reachability at FM 2024
Yuang Geng presented his work on reachability for vision-based neural-network controllers at the 26th International Symposium on Formal Methods (FM). Reportedly, the attendees are curious about the mapping between states and images. Citation and further materials:
-

Zhenjiang presents calibrated safety predictors at L4DC 2024
Zhenjiang Mao presented his work on learning-enabled safety prediction (poster, paper) at the 6th Annual Conference on Learning for Decision and Control (L4DC 2024) in Oxford, UK. Reportedly, the attendees like math more than he does. Citation: Zhenjiang Mao, Carson Sobolewski, Ivan Ruchkin. How Safe Am I Given What I See? Calibrated Prediction of Safety…
-

New NSF project on neuro-symbolic perception in CPS
The new project is named “Neuro-Symbolic Bridge: From Perception to Estimation & Control“. Its goal is to develop a neuro-symbolic calibration framework to repair the mismatch between perception neural networks and downstream cyber-physical tasks such as state estimation and control. It will be carried out in collaboration with Radoslav Ivanov at RPI. More information: ECE…
-

Ivan spends summer at AFRL as a visiting faculty
For Summer 2024, Ivan Ruchkin will join the Visiting Faculty Research Program (VFRP) at the Air Force Research Laboratory (AFRL) Information Directorate (RI) in Rome, NY. The program is organized by the Griffis Institute. Ivan will work on advancing safety verification for high-dimensional controllers. He will also participate in the cyber assurance group’s efforts on…
-

Zhenjiang presents two papers and a poster at ICRA 2024
The papers were on foundation world models and language-enhanced OOD. The audience response was, reportedly, positive and encouraged the implementation on physical robotic systems. Citations:
-

Ivan presents NN repair with preservation at ICCPS 2024
In the first presentation of ICCPS 2024, Ivan showcased a method to repair a neural network controller while preserving its verification results. Citation: Pengyuan Lu, Matthew Cleaveland, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Repairing Learning-Enabled Controllers While Preserving What Works [Arxiv] [Github] [Slides]. In Proceedings of the International Conference on Cyber-Physical Systems (ICCPS), Hong Kong, China, 2024.
-
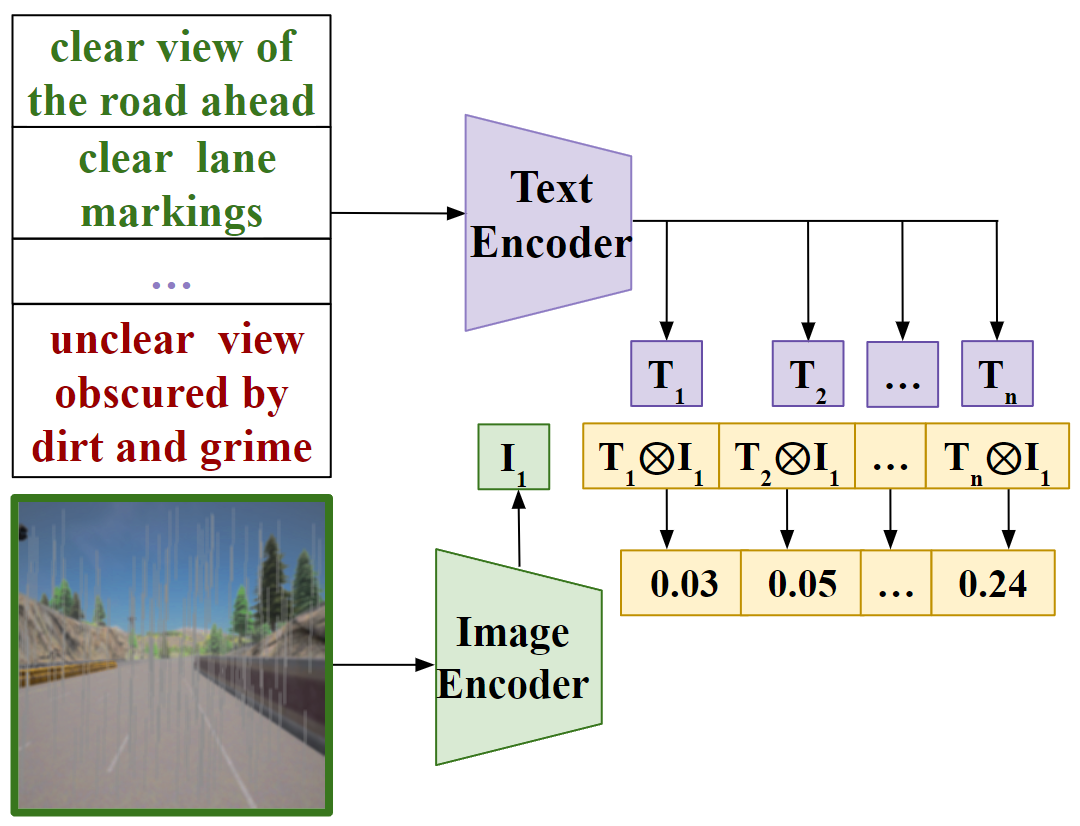
Language-enhanced OOD detection: new preprint online
Our paper gives users of autonomous cars the ability to describe in natural language what conditions they consider nominal or anomalous. Citation:
-
F1/10 racing demo for the ECE External Advisory Board
Industry leaders visited the ECE department to witness the variety of work happening here. Thanks to everyone who helped, especially Carson Sobolewski and Lorant Domokos who led the demonstration. Some videos and photos from the event: