Author: Ivan
-
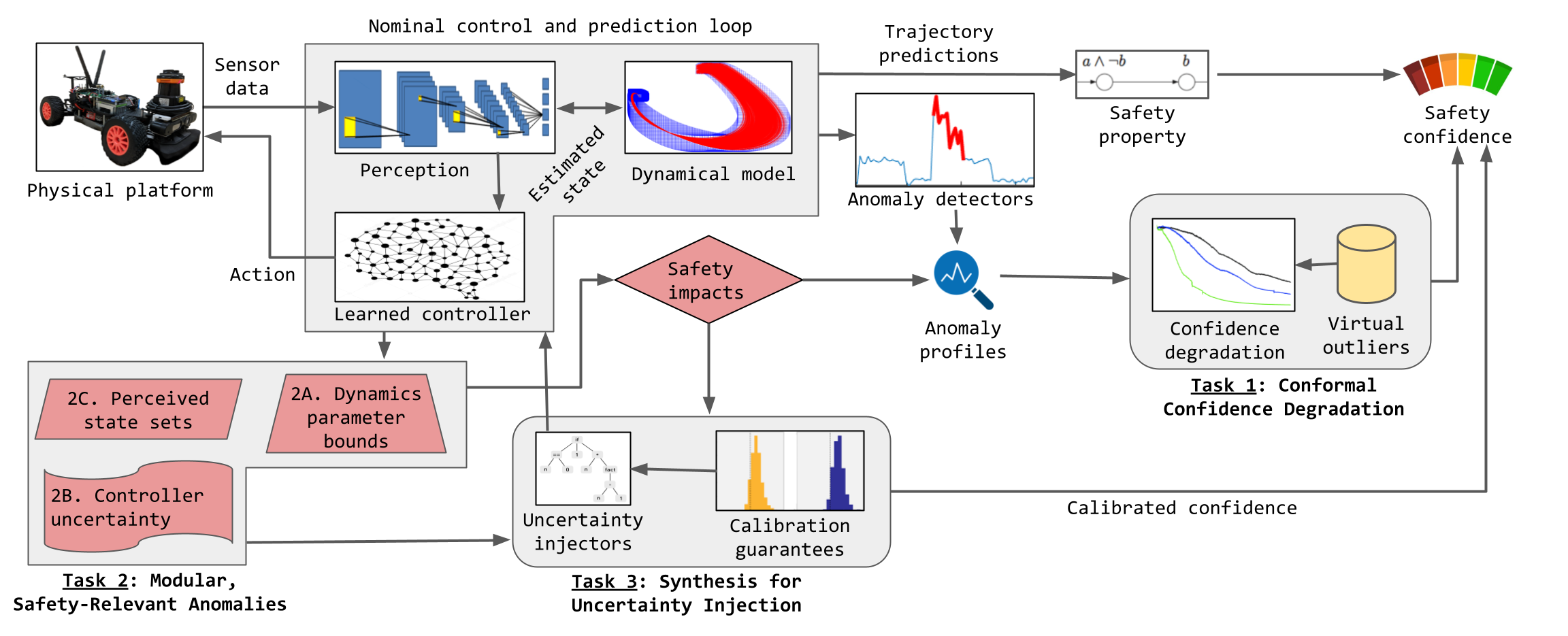
New NSF project on confidence calibration under anomalies
The last decade has seen a flourishing of detection capabilities for various anomalies and out-of-distribution samples. However, the question of what an autonomous system should do after it detects an anomaly is incredibly challenging and seems to be nowhere near a satisfying answer. A reasonable step after detecting an anomaly is to figure out, in…
-
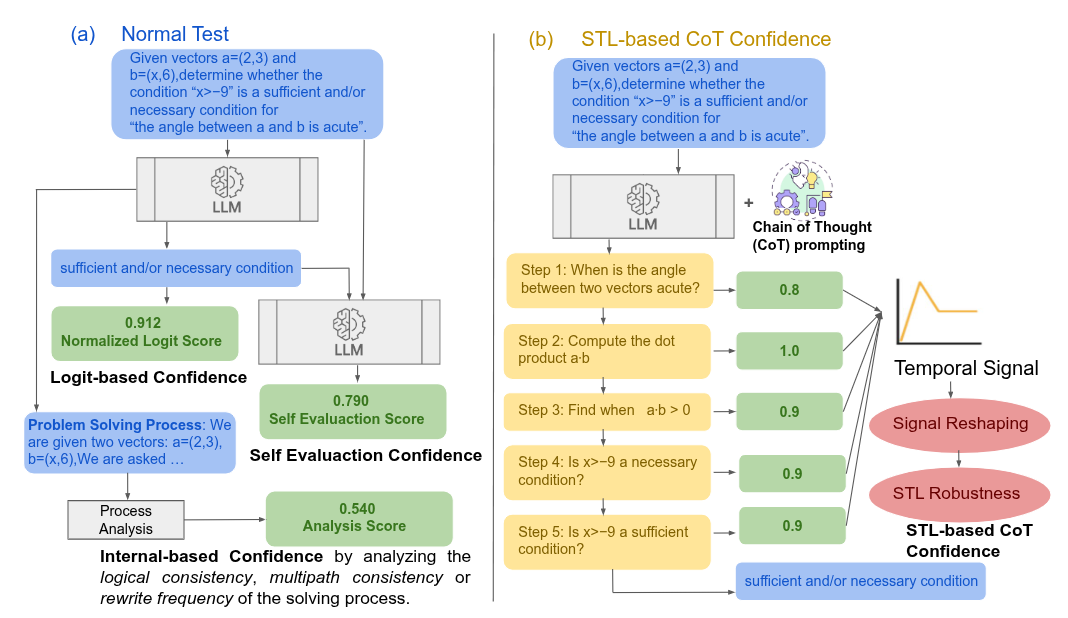
New preprint: chain-of-thought confidence with STL
We converted a SAS course project to a workshop paper about how to calibrate the confidence in chain-of-thought reasoning using a temporal logic formula: Stay tuned for more!
-

Ivan presents principles of world modeling at NeuS 2025
Ivan revisited his old grazing grounds in Philly to present 4 principles for making world models more physically grounded. There was an intense discussion of whether purely symbolic simulators should count as generative world models. Citation: In the meantime, the RPI collaborators Thomas and Rado presented a joint work on state-based conformal prediction. Citation:
-

Zhongzheng and Yuyang give racing demo to Nelms family
Thanks to Yuyang and Zhongzheng for impressing the visitors from the generous Nelms family on a new racing track!
-

Jordan & Ivan present world models at ICRA 2025
To the audience’s excitement, Jordan and Ivan presented the lab’s work on principles of physically interpretable work models in two capacities: Citation:
-

Jordan and Ivan present at CPS-IoT Week 2025
Several events transpired at the CPS-IoT Week in Irvine, CA: Jordan presented his poster (pictured) on probabilistic verification & validation at HSCC. Ivan presented his collaborative work on imprecise neural networks at HSCC. Ivan chaired the ICCPS poster/demo session and a couple of paper sessions, and also judged posters in the PhD forum.
-

Lorant wins the student leader and best poster awards
Congratulations to Lorant Domokos on winning two (!) awards from the Department of Mechanical and Aerospace Engineering (MAE) at the end of his senior year:
-

Carson & Lorant present at the UF Spring Symposium
Carson Sobolewski and Lorant Domokos presented their posters at the UF Spring Undergraduate Research Symposium 2025 as part of their scholarship programs: Generalizable Image Repair for Robust Visual Autonomous Racing Autonomous Drift Detection and Online Road Friction Estimation Allegedly, Chris Oeltjen was also in attendance.
-
New preprint: conservative perception abstractions
A new preprint is out on low-dimensional symbolic models of deep visual perception that enable conservative (i.e., non-overconfident) safety analysis. Citation: Matthew Cleaveland, Pengyuan Lu, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Conservative Perception Models for Probabilistic Model Checking [Arxiv]. Preprint, 2025.
-
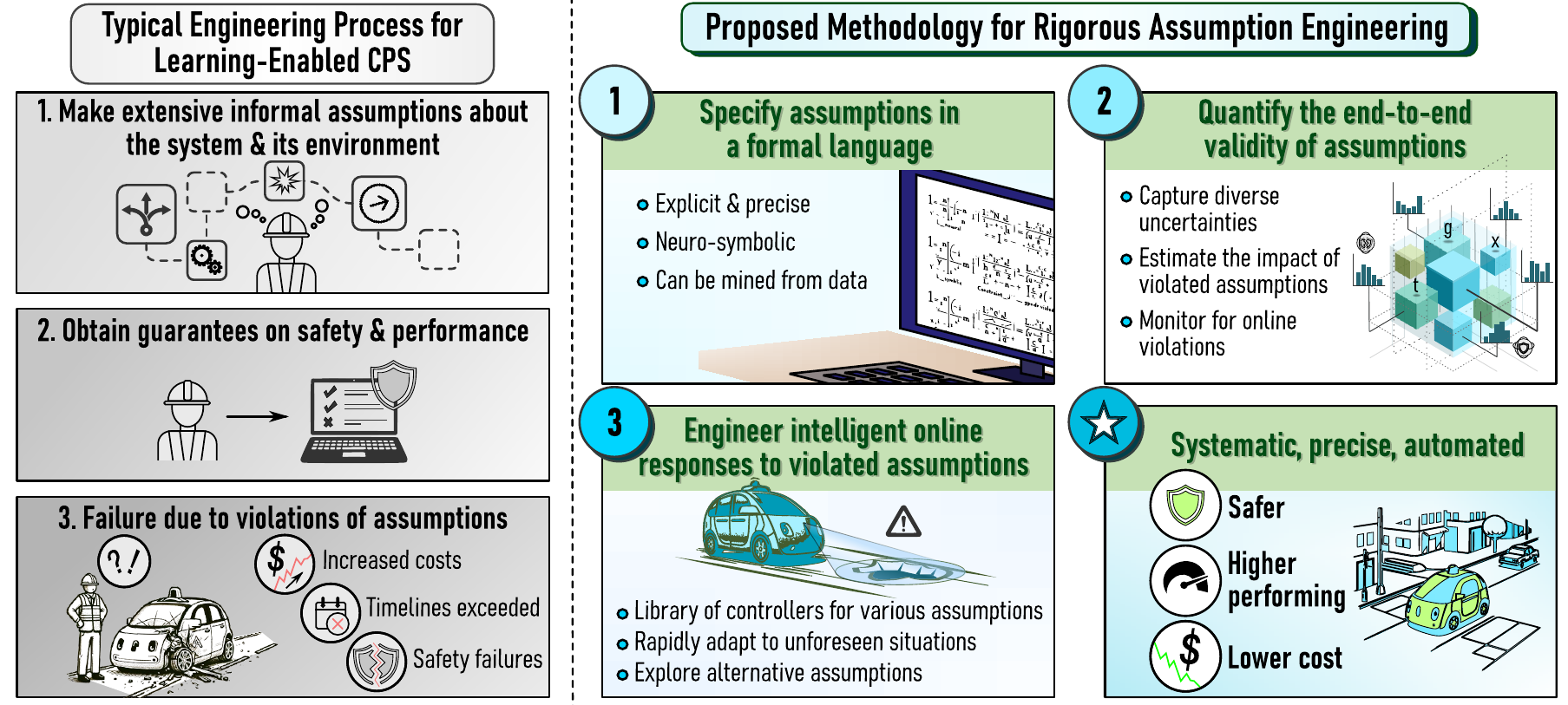
Ivan receives the NSF CAREER Award
While everyone and their brother are chasing guarantees for autonomous systems, their assumptions are being overlooked. Ivan got the prestigious NSF CAREER grant to fix that problem: the new project will focus on the careful understanding, modeling, validation, and monitoring of important assumptions in learning-based autonomous systems. More: ECE news HWCOE news NSF award record