Category: News
-

Invited talk at the DACPS workshop & ETH Autonomy Talks
—
Update 1: an extended version of this talk was given at a UF MAE Affiliate Seminar. The recording can be found here (UF login required). Update 2: another version of this walk was given at the ETH Autonomy Talks (video). Update 3: yet another version of this talks was given as a CNEL Seminar. The…
-

TEA Lab hosts K-12 students for the Robotics-AIoT Visit Day
On June 15, 2023, the UF ECE Department hosted ~30 school students from the Westwood Middle School and Buchholz High School for a day visit at the Robotics, AI, and IoT research laboratories for educational presentations, research demonstrations, and mentoring discussions. It was a lot of fun for everyone! Kudos to the other participating labs:…
-

Causal NN controller repair presented at ICAA’23
—
Shown above is a 5-step workflow of our causal repair: (1) Extract the behaviors of a learning component as an I/O table. (2) Encode the dependency of the desired property outcome on the I/O behaviors with a Halpern-Pearl model. (3) Search for a counterfactual model value assignment, revealing an actual cause and a repair. (4)…
-

Conservative safety monitoring presented at NFM’23
—
Shown above is our conservative monitoring approach that leverages probabilistic reachability offline and combines it with calibrated state estimation. Citation: Matthew Cleaveland, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Conservative Safety Monitors of Stochastic Dynamical Systems [ArXiv] [Springer] [Slides]. In Proceedings of the NASA Formal Methods Symposium (NFM), Houston, TX, 2023.
-

DonkeyCars are racing autonomously
Our lab is now running neural network-controlled racing cars based on raw camera images: Sometimes things don’t go as planned: Such is the brittle nature of deep learning. We’ll be working on predicting and preventing such accidents.
-

Ivan Ruchkin to serve on the PC of ICCPS’23
Program Committee of the 14th ACM/IEEE International Conference on Cyber-Physical Systems
-
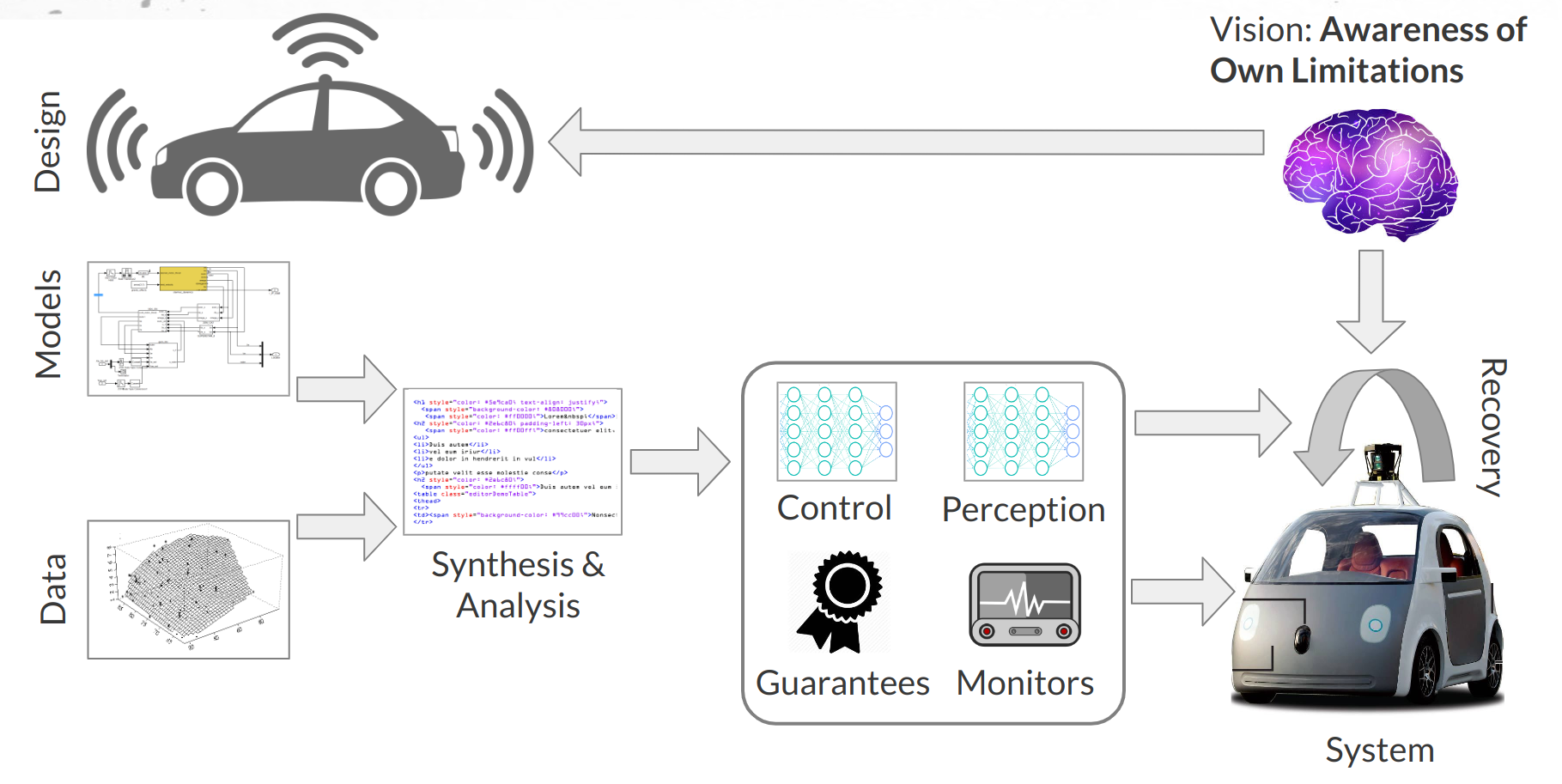
TEA Lab is established
—
TEA lab’s mission is to develop engineering methodologies for safe autonomous systems that are aware of their own limitations, as illustrated above. More details about this vision can be found in this slide deck.