Category: News
-

Carson & Lorant present at the UF Spring Symposium
Carson Sobolewski and Lorant Domokos presented their posters at the UF Spring Undergraduate Research Symposium 2025 as part of their scholarship programs: Generalizable Image Repair for Robust Visual Autonomous Racing Autonomous Drift Detection and Online Road Friction Estimation Allegedly, Chris Oeltjen was also in attendance.
-
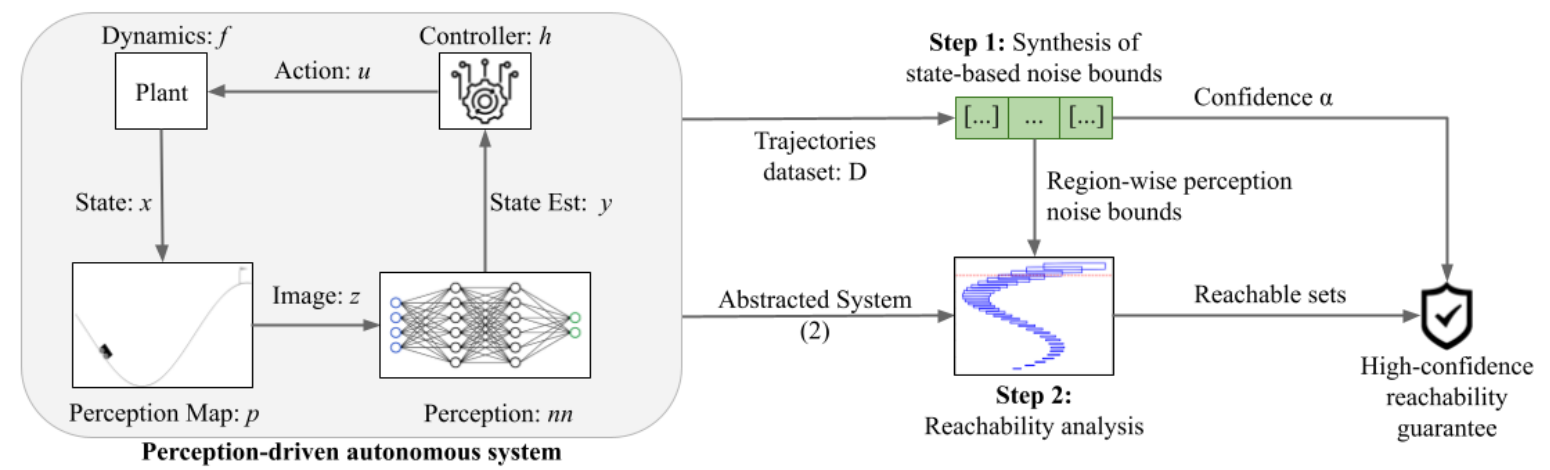
New preprint: conservative perception abstractions
A new preprint is out on low-dimensional symbolic models of deep visual perception that enable conservative (i.e., non-overconfident) safety analysis. Citation: Matthew Cleaveland, Pengyuan Lu, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Conservative Perception Models for Probabilistic Model Checking [Arxiv]. Preprint, 2025.
-
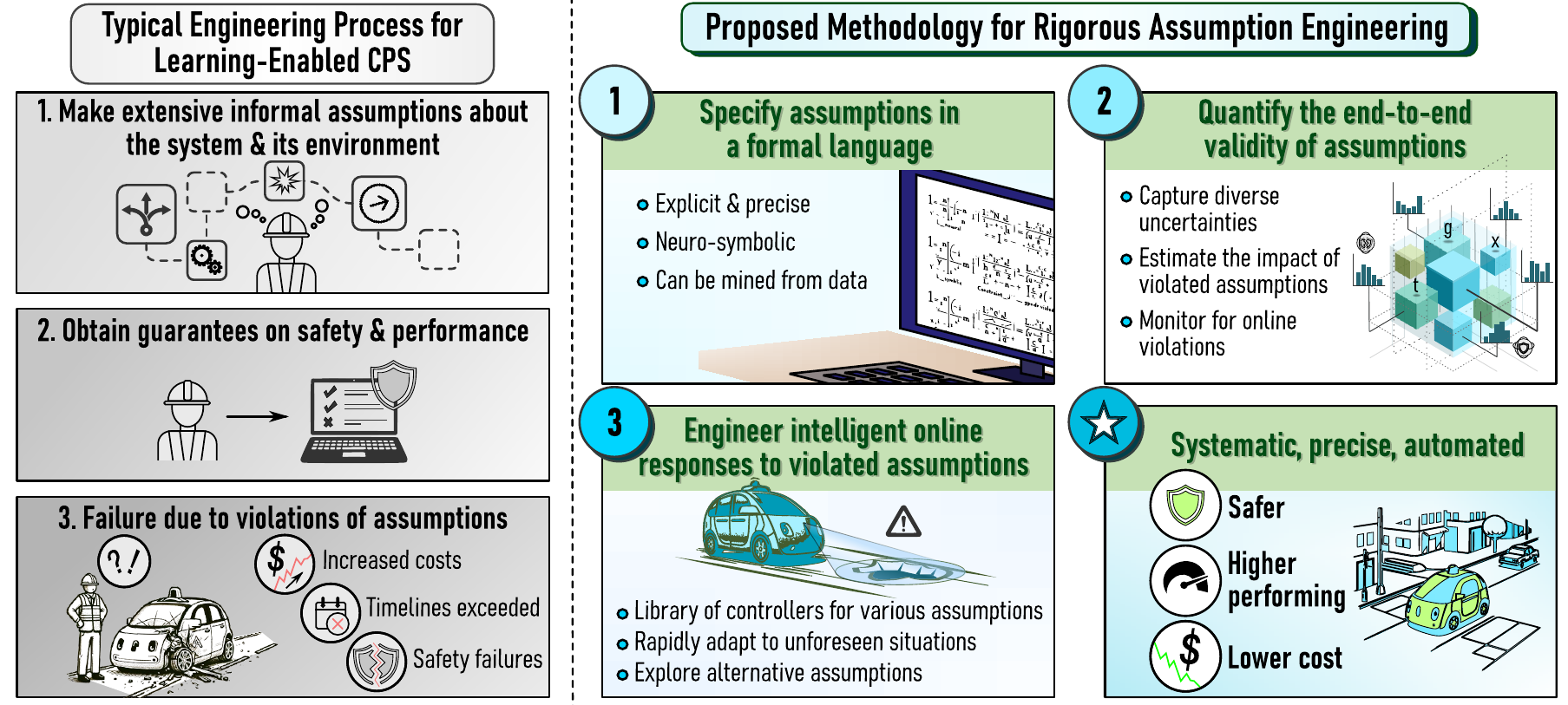
Ivan receives the NSF CAREER Award
While everyone and their brother are chasing guarantees for autonomous systems, their assumptions are being overlooked. Ivan got the prestigious NSF CAREER grant to fix that problem: the new project will focus on the careful understanding, modeling, validation, and monitoring of important assumptions in learning-based autonomous systems. More: ECE news HWCOE news NSF award record
-

New preprint: generalizable image repair
Advanced GANs make short work of previously unseen image corruptions. Update: accepted to IROS 2025! Citation: Carson Sobolewski, Zhenjiang Mao, Kshitij Vejre, Ivan Ruchkin. Generalizable Image Repair for Robust Visual Autonomous Racing [Arxiv] [Poster] [Github] [Video]. Preprint, 2025.
-
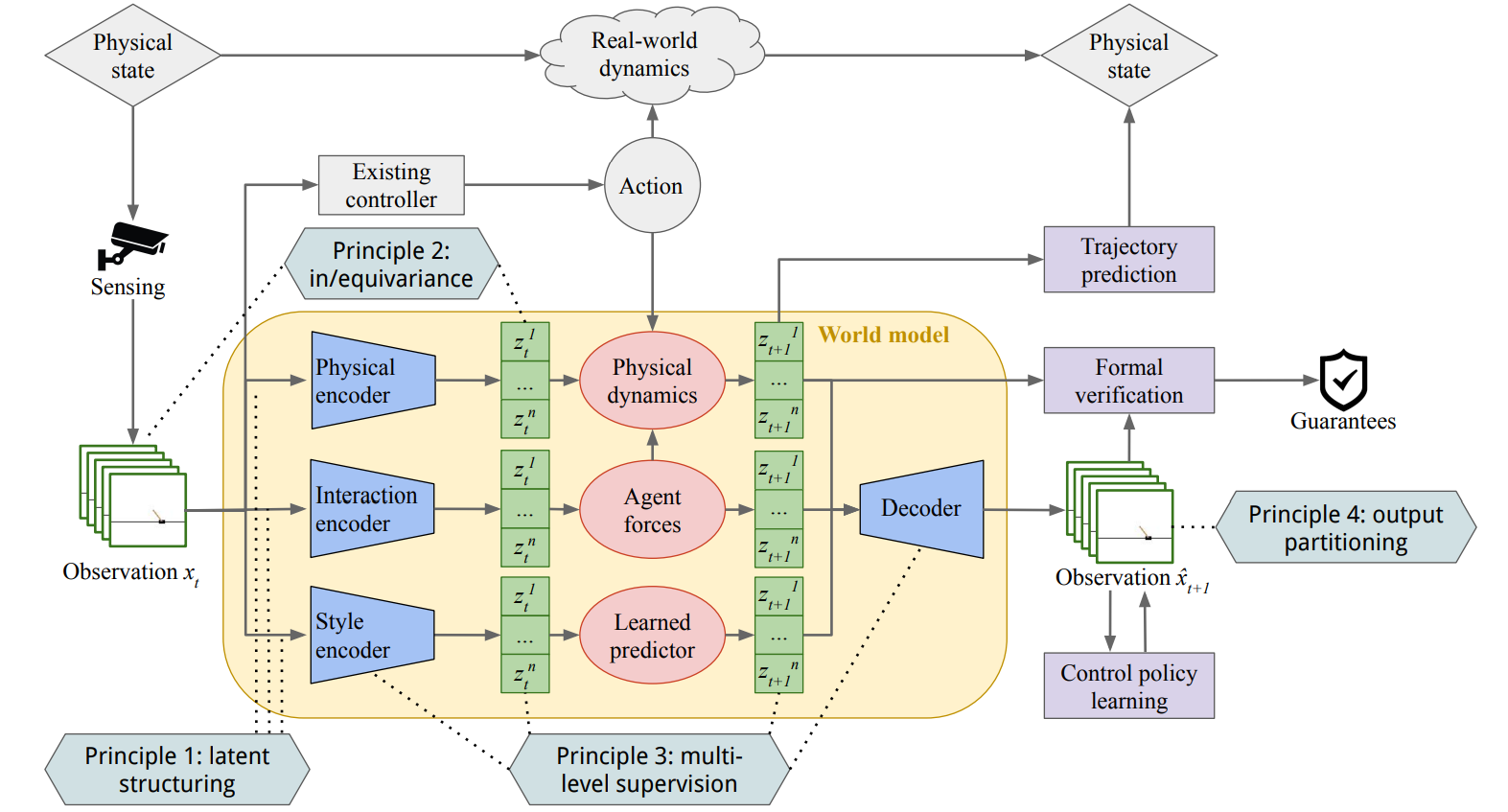
New preprint: principles for interpretable world models
Our new paper articulates four key principles for physical interpretability of world models. We paint a broader picture on neuro-symbolic world models, beyond our recent preprint on a specific technique for physically interpretable world models for trajectory prediction. Update: accepted and presented at NeuS 2025! It also got publicized at ICRA. Citation:
-
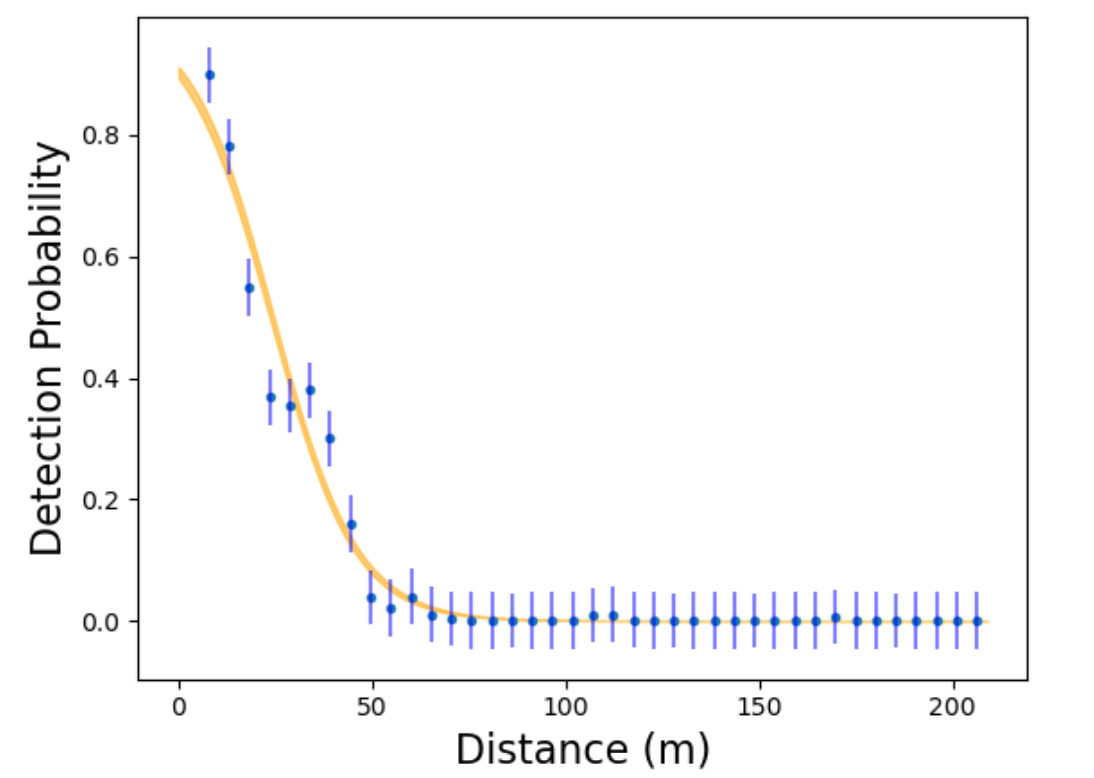
New preprint: state-based conformal prediction
Our first collaborative paper on the NSF Neuro-Symbolic Bridge project with RPI is online! It develops a novel way to get tight conformal prediction bounds on perception error in order to improve the accuracy of reachability verification. Update: published and presented at NeuS’25! Citation:
-

TEA lab does double racing demos for Spring Visit
Great job to those who put together the demos for the ECE and MAE Spring Visits, particularly Zhongzheng and the F1/10 team!
-

New preprint: stratified neuro-symbolic architecture
Check out our nice and short position paper. The key idea is to intermingle neural components and symbolic knowledge at each level of the autonomy stack. Update: published in FSE’25! Citation:
-

Ivan co-chairs the poster/demo session at ICCPS 2025
—
The International Conference on Cyber-Physical Systems (ICCPS) 2025 is seeking poster and demo submissions for its 16th iteration, in Irvine, CA. Details can be found here.
-
Ivan co-chairs the poster/demo session at ICCPS 2025
—
The International Conference on Cyber-Physical Systems (ICCPS) 2025 is seeking poster and demo submissions for its 16th iteration, in Irvine, CA. Details can be found here.