Author: Ivan
-
New preprint: verifiable deterministic world models
Our exploration of world models for system assurance resulted in a semi-predictable but currently unfashionable choice: removing randomness and uncertainty from the latent space made world models more verifiable (although a tiny bit less picture-perfect). More surprisingly, this step made the behaviors produced by them more relevant to the real world. As a result, we…
-

STL CoT confidence = most innovative poster
Zhenjiang and Ani presented a poster with their work on chain-of-thought confidence with signal temporal logic at the Annual Nelms IoT Conference. The core idea of this research is to find patterns in LLM confidence that tend to correlate with correct and incorrect answers. Then, these patterns can be used to determine the confidence, i.e.,…
-

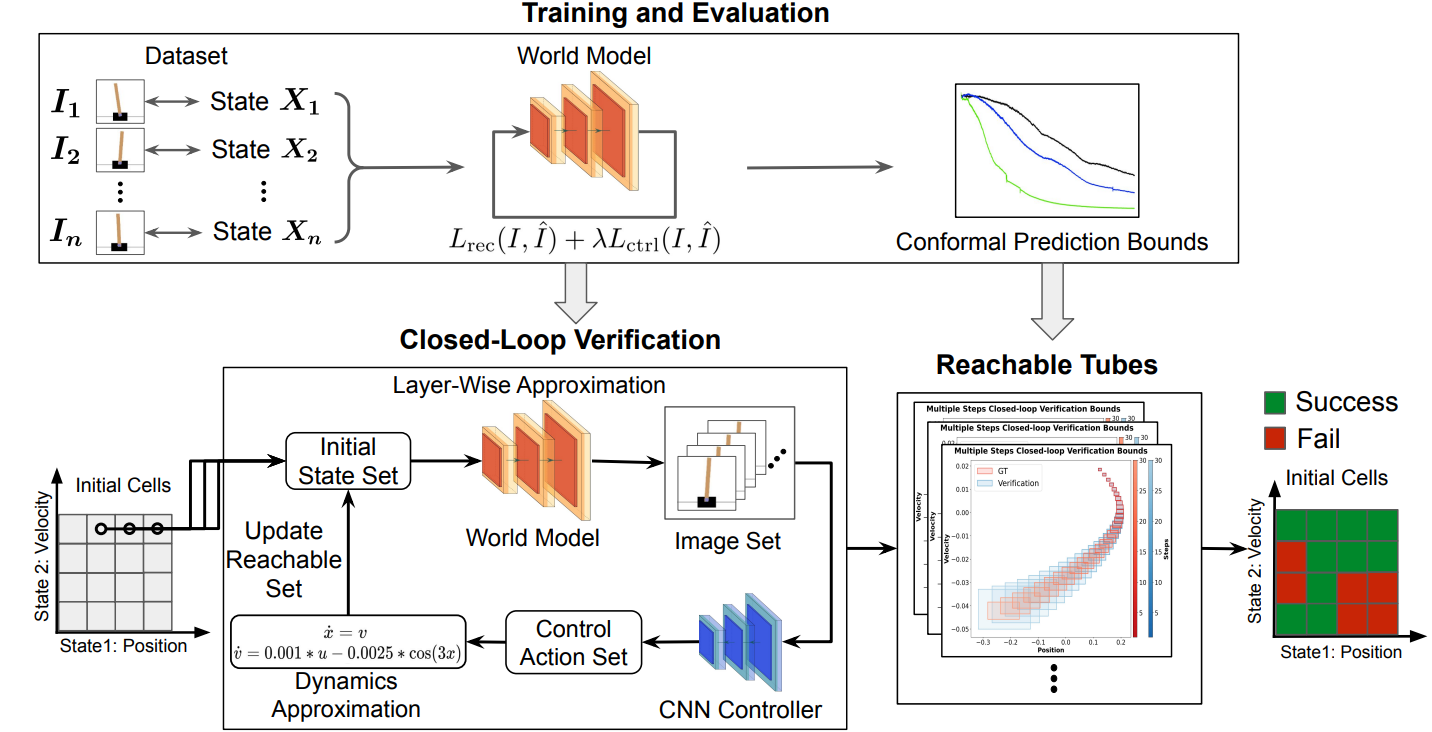
New preprint: statistical-symbolic verification of perception
Our collaboration with RPI has yielded an extended and improved version of our NeuS’25 paper: combining conformal prediction for neural perception with reachability analysis for the dynamics and control. This problem required constructing a discrete abstraction of the perception neural net, which we did with a genetic algorithm. Citation:
-

ECE showcases new club: Gator Autonomous Racing
This semester marks a major development: the Gator Autonomous Racing (GAR) student club/design team was officially spun off from the TEA Lab. This week, the club has put together an impressive showcase with two racing cars (F1/tenth, aka RoboRacer) in the middle of Malachowsky Hall. The demonstration has attracted a lot of attention! A huge…
-

New preprint: a survey of CPS assumptions
We’ve put in a big effort to find, categorize, and analyze assumptions and guarantees in papers on cyber-physical systems since 2014. Now we’re happy to release the results! Citation: We are also sharing our database of analyzed papers and assumptions.
-

Ivan does publicity for a neuro-symbolic conference
Ivan Ruchkin is serving as the publicity chair of the 3rd International Conference on Neuro-Symbolic Systems (NeuS) 2026. Looking forward to your submissions!
-

Jordan presents V&V for vision-based systems at ATVA
Jordan Peper went all the way to Bengaluru, India, to present our work (in collaboration with UIUC) on unified verification and validation of vision-based autonomy at the International Symposium on Automated Technology for Verification and Analysis (ATVA). Allegedly, this is a hot problem, but the abstraction is quite complex. That’s what it takes — for…
-

AutoGators win Most Innovative @ Autonomy Hackaton
Congratulations to the team AutoGators (Krish Kapadia, Yilin Liu, Zhenjiang Mao, Ishaan Sen, Zhongzheng Zhang, Zhuoyang Zhou) on winning the “Most Innovative Solution” Award ($10K) at the Mission Autonomy Hackathon organized by AWS and Vanderbilt. Here is the problem they solved: “Given a swarm of autonomous aerial drones tracking a resupply convoy, use aerial imagery to…
-

IROS showcase: world models, image repair, data cleaning
Ivan went all the way to Hangzhou, China, to present several research works on world models, image repair, and data cleaning. Here are the paper citations on which these presentations were based:
-

Trevor and Jordan win student research awards at ESWEEK
Congrats to Trevor Turnquist and Jordan Peper on winning the First Undergraduate and Runner-Up Graduate Awards at the ACM Student Research Competition hosted at the Embedded Systems Week 2025! Photos from the event: The papers relevant to these competition submissions: