Category: Grant
-

New NSF project on verifiable safety under visual shifts
We are excited to start the VISUALS project: Verifiable Information-Theoretic Safety Under Augmented Latent Shifts, in collaboration with Yuheng Bu (UCSB) and Jose Principe (UF), sponsored by the NSF EPCN program. This project aims to create an end-to-end methodology to model, analyze, quantify, detect, and adapt to changes in the visual environment of an autonomous…
-
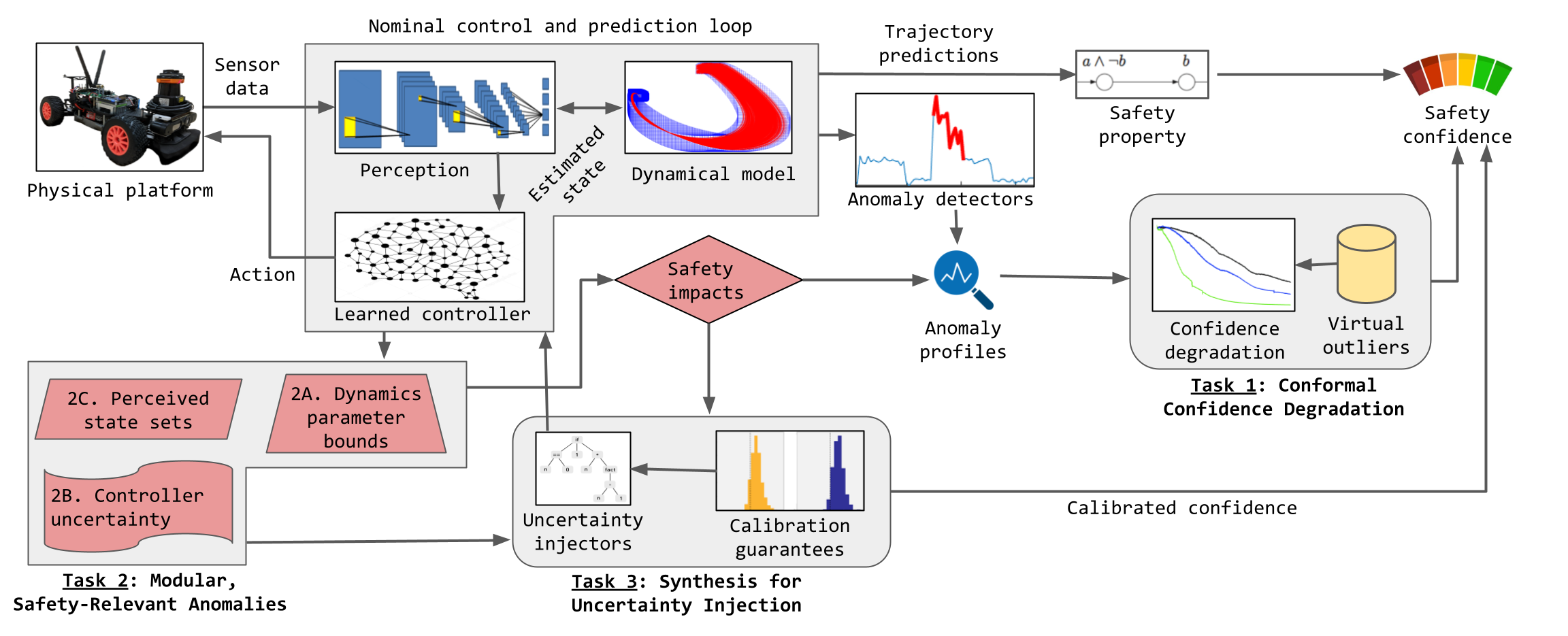
New NSF project on confidence calibration under anomalies
The last decade has seen a flourishing of detection capabilities for various anomalies and out-of-distribution samples. However, the question of what an autonomous system should do after it detects an anomaly is incredibly challenging and seems to be nowhere near a satisfying answer. A reasonable step after detecting an anomaly is to figure out, in…
-
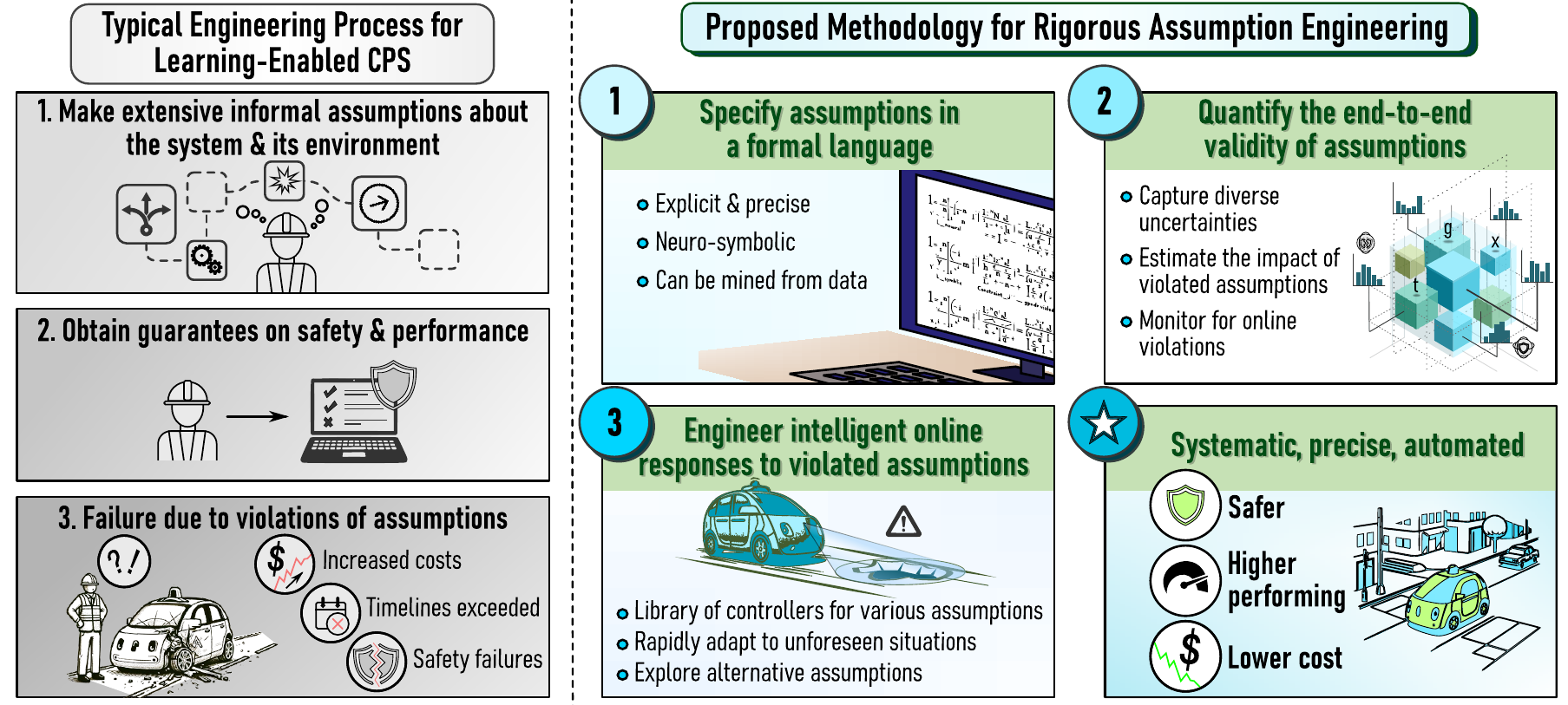
Ivan receives the NSF CAREER Award
While everyone and their brother are chasing guarantees for autonomous systems, their assumptions are being overlooked. Ivan got the prestigious NSF CAREER grant to fix that problem: the new project will focus on the careful understanding, modeling, validation, and monitoring of important assumptions in learning-based autonomous systems. More: ECE news HWCOE news NSF award record
-

New NSF project on neuro-symbolic perception in CPS
The new project is named “Neuro-Symbolic Bridge: From Perception to Estimation & Control“. Its goal is to develop a neuro-symbolic calibration framework to repair the mismatch between perception neural networks and downstream cyber-physical tasks such as state estimation and control. It will be carried out in collaboration with Radoslav Ivanov at RPI. More information: ECE…