Author: Ivan
-

Conservative safety monitoring presented at NFM’23
Shown above is our conservative monitoring approach that leverages probabilistic reachability offline and combines it with calibrated state estimation. Citation: Matthew Cleaveland, Oleg Sokolsky, Insup Lee, Ivan Ruchkin. Conservative Safety Monitors of Stochastic Dynamical Systems [ArXiv] [Springer] [Slides]. In Proceedings of the NASA Formal Methods Symposium (NFM), Houston, TX, 2023.
-

DonkeyCars are racing autonomously
Our lab is now running neural network-controlled racing cars based on raw camera images: Sometimes things don’t go as planned: Such is the brittle nature of deep learning. We’ll be working on predicting and preventing such accidents.
-

Ivan Ruchkin to serve on the PC of ICCPS’23
Program Committee of the 14th ACM/IEEE International Conference on Cyber-Physical Systems
-
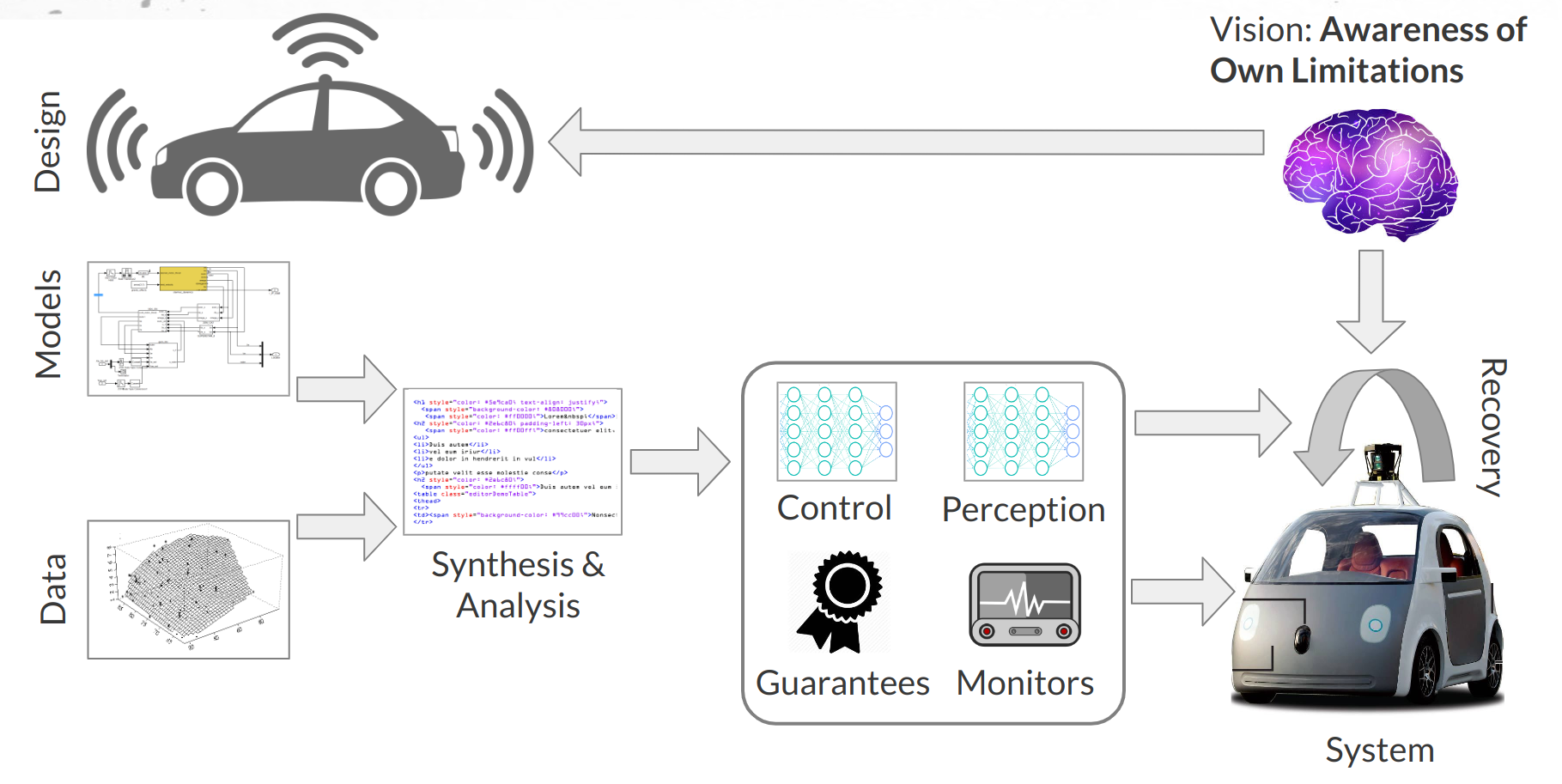
TEA Lab is established
TEA lab’s mission is to develop engineering methodologies for safe autonomous systems that are aware of their own limitations, as illustrated above. More details about this vision can be found in this slide deck.