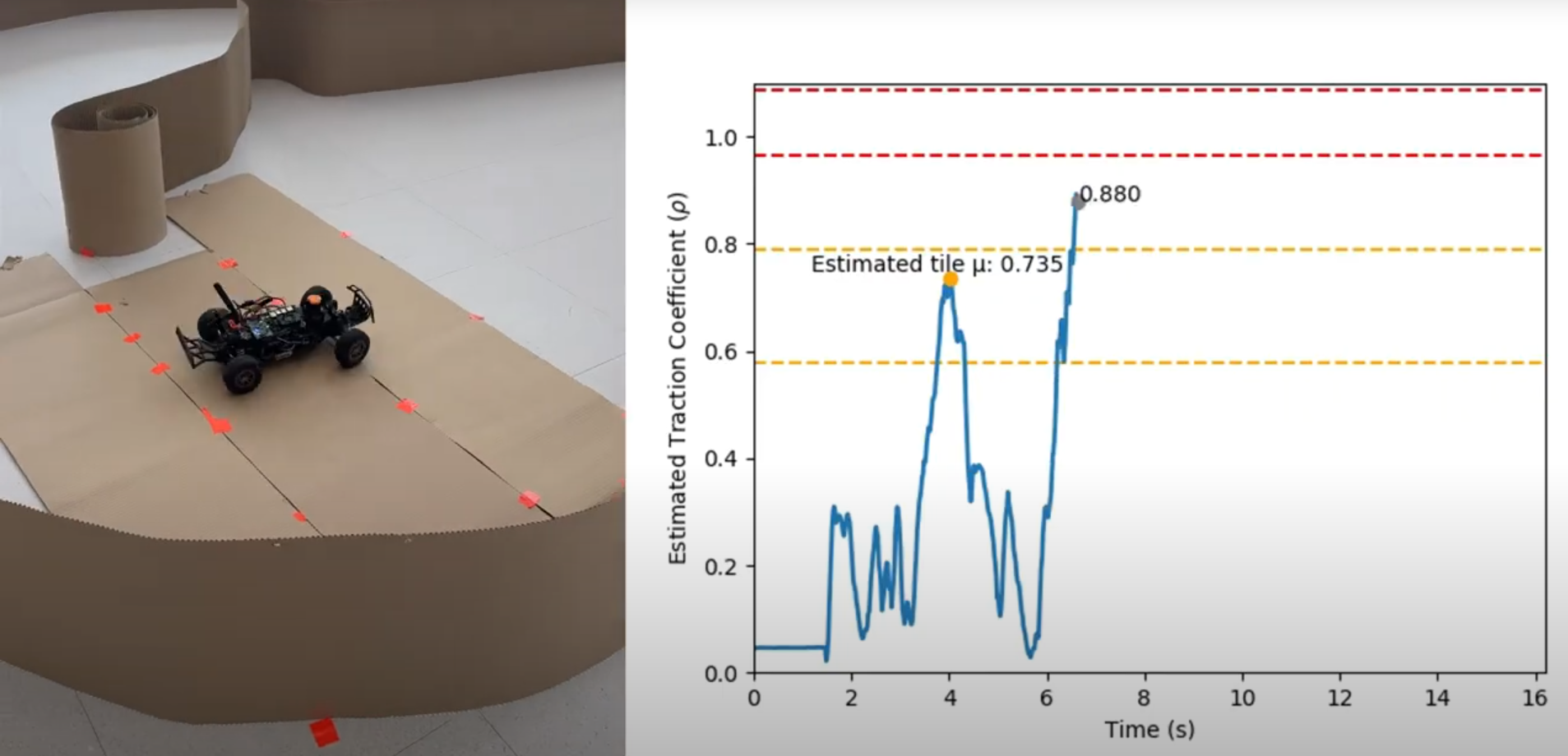
Our lab pushed out an experimental project on detecting slip and estimating the tire friction from the onboard sensors (lidar & IMU) on RoboRacer (aka F1/10) cars. No fancy models, no sophisticated data collection, no need for post-processing. It turned out pretty accurate!
TEA Lab: Trustworthy Engineered Autonomy
Safe Autonomous Systems @ University of Florida ECE